Websites
Byte Club
Computer Club of Bal Bharati, Pitampura
open_in_browserVISIT WEBSITE

Sensing a lack of organization among the technology enthusiasts, I proposed the formation of the Club to the School in 2016. Since then, the school has wholeheartedly supported our club's growth — We have a website, we have hosted intra-school activities, and we are planning to host an inter-school competition in 2018.
About the Club
So here's a bit about us. We are visionaries, who love to discuss and debate about tech and to make it a part of our life. We believe in working as a single unit, i.e. Byte and we do this by participating in various events and taking initiatives for social awareness through various projects.
Forever EV3
Team India for RoboCup 2017
open_in_browserVISIT WEBSITE
About the Team
We love to deal with all forms of technology. For RoboCup Junior, we built rescue robots that simulate autonomous rescue operation. Apart from Robotics, we enjoy making websites, films and apps. When it comes to technology, we are the optimists who feel it has the capability to change the world and the way we live. We take problems as challenges and strongly believe in the fact that every problem has a solution. We like programming, graphic designing, robotics, web development and all that can help make a positive impact on the world. We speak C++, JavaScript, HTML, CSS, C# and PHP.
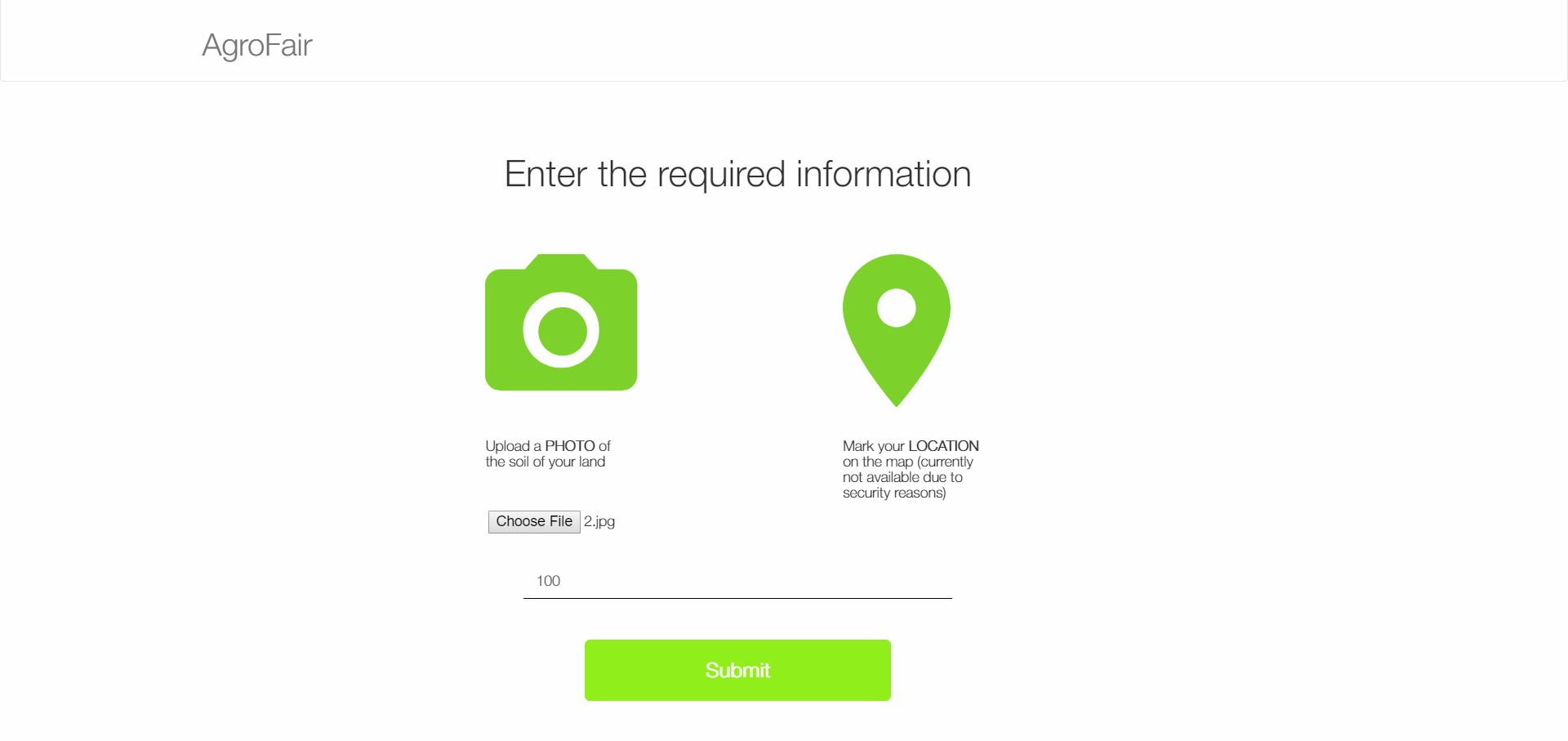
AgroFair
Agricultural Startup Prototype
Made for Bharat Hacks
remove_red_eyePREVIEW DEMO
codeREAD CODE
My most exhilarating web-development experience was hacking together this app overnight with my team. I helped develop the Image Recognition, and I handled how the data goes in and out of the Database using server-side PHP and MySQL scripting.
About the App
We feel that most farmers in India today are not in-line with continuously changing technology. Agrofair attempts to bridge this gap between the two by providing recommendations of crop based on the weather, soil type, rain and tries to increase the overall profitability of the farmer.
Currently, our product uses RGB image recognition in order to determine the soil type and geolocation to aggregate weather information, thus giving inputs on what crop the farmer should plant in order to make the most money. You just point your phone's camera at your farm; we handle the rest.
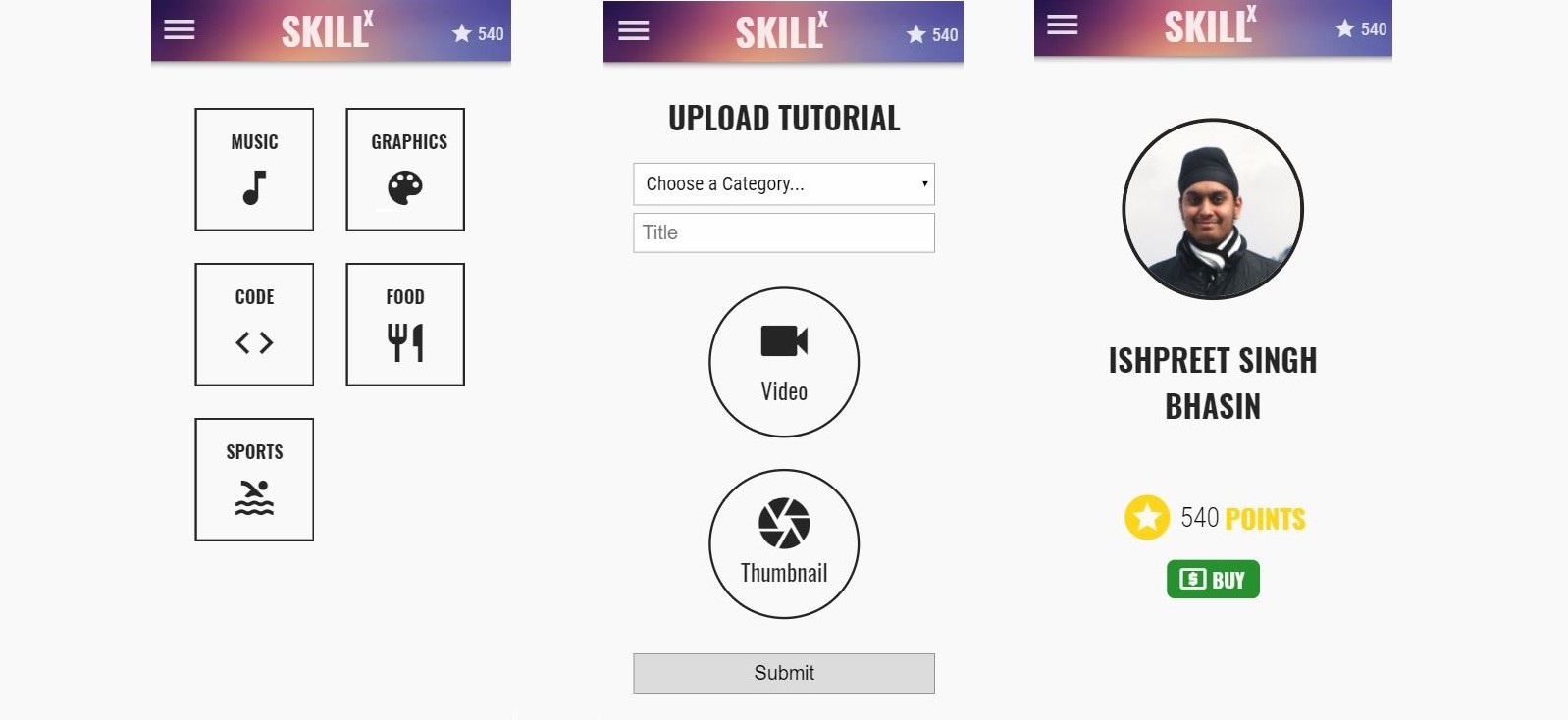
SkillX
EdTech Startup Prototype
Made for MINET X 2017
remove_red_eyePREVIEW DEMO
codeREAD CODE
I handled how the data goes in and out of the Database using server-side PHP and MySQL scripting.
About the App
Skillx is a community-driven EdTech App. People can teach their skills to other people and earn points. These points can be redeemed to learn a new set of skills from professionals in that field. This way, the people are provided with a free of cost platform that promotes sharing of knowledge. The app focuses on providing the people with rich, relevant, and premium content, without involving any money. The quality of the content is assured by the community itself through a system of ratings.
The Times of Lorem
News Reader Application Prototype
Made for G@teway 2016
remove_red_eyePREVIEW DEMO
codeREAD CODE
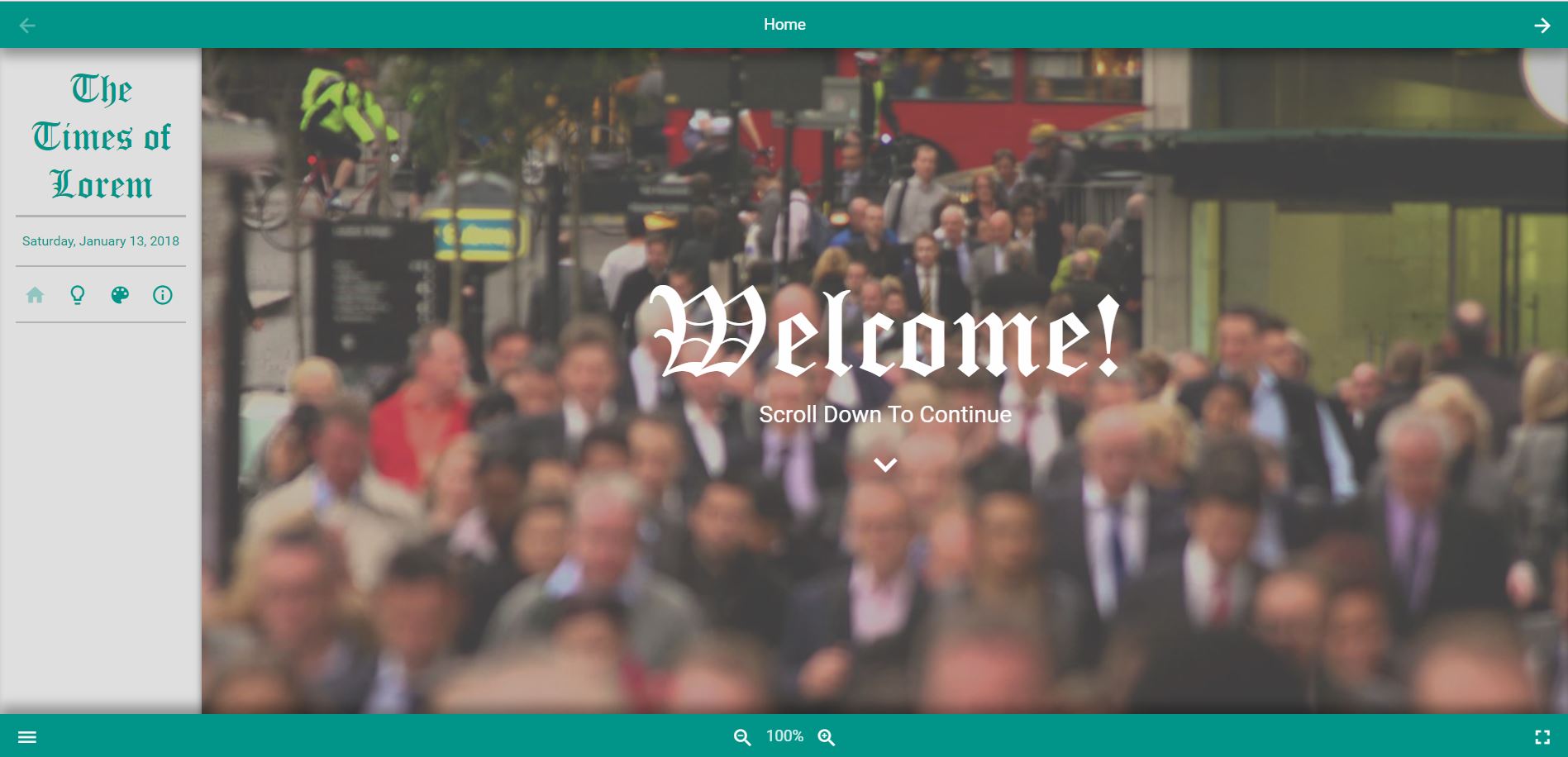
I programmed it in JavaScript in such a way that each time an article ends, the app automatically scrolls horizontally, instead of vertically, to the next article.
About the App
The Times of Lorem is a news reader application. It is built to provide the readers with maximum comfort by allowing them to customize their experience according to their needs.
Urban Gnaw
Food Startup Prototype
Made for Exun 2016
remove_red_eyePREVIEW DEMO
codeREAD CODE
While I satisfied the purpose of the website by scripting the server to accept food orders and setting up a mailing server, I also enjoyed developing an animated menu button for the website's user interface.
About the Website
Urban Gnaw is a fictitious, Indian food startup. The website can handle taking orders and finding the nearest delivery hub. Since it's a just demo now, it serves memes instead of real food.
Google® Pixel© Parody
Made for Xino 2016
open_in_browserVISIT LANDING PAGE
In anticipation of the then upcoming Pixel series of smart phones by Google, I imagined a new, satirical Google design philosophy which could succeed Material Design.
Pseudoverse
Fictitious Startup Landing Page
Made for Access 2016
open_in_browserVISIT LANDING PAGE
Pseudoverse is a fictitious startup aimed at finding the truth about whether we are all part of a simulated reality. I tried to make its website more attractive by designing a slider that highlights the proposed question with reference to popular culture i.e Lyrics from Bohemian Rhapsody and The-Matrix-like graphics.
Robots
RoboCup® Junior Rescue-Line
2017
remove_red_eyeREAD JOURNAL
Yes, this robot is called "AURUM." It's Latin for Gold. And the robot is as lovable as gold. But we just didn't name it AURUM because of that. AURUM stands for Autonomous Rescue-Line Unmanned Machine.
My team, Forever EV3, and I crafted AURUM initially for RoboCup North India Zonal Competition. As we kept on qualifying stages, we kept on improving it for the following stages. AURUM helped make us the National Champions, and it also won an award for Creativity and Innovation. In the International Championship, it mated with a German robot to beat the Super Team Challenge, and subsequently won fourth position. We journaled its creation process on our website, and the journal is available as a PDF here. It contains a detailed description of how I modified the line-following algorithm based on proportional-integral-derivative controllers to work with data from multiple sensors on each side of the robot.
World Robot Olympiad
2017
We planned to solve the challenge in a quick way by collecting all the objects at once, and constructing turbines once we had all the parts. The mechanical design Aryan made had one complication: it would only work if the robot aligns exactly with the part to be picked. As the programmer, it was my job to work around that. I devised an algorithm to align the robot perpendicularly to lines using light sensors, and used this algorithm repetitively through a well-planned path in order to align the robot to the part perfectly every time.
World Robot Olympiad
2015
Our strategy was to make the robot ingest all objects into a tube. As the programmer, what I particularly found most interesting was the implementation of path-finding algorithms for finding the shortest paths along color-coded grids. These algorithms assume zero time interval for changing the orientation, but in real-world robotics, the robot takes noticeable time for turning. Since I wanted our robot to score full in a quicker time than our competitors, I modified the existing Dijkstra's algorithm to meet my task-specific need.
FIRST® LEGO® League
2014
The major challenge was strategizing and developing artificial limbs for the robot to perform various, small tasks. We designed such mechanical implements that could fulfill many such tasks consecutively, and hence save the robot time for performing more tasks and scoring more points. I made a proportional-controller algorithm to make the robot turn to exact headings using data from a gyro sensor, and hence ensure that the robot follows the exact path which places it exactly in front of the tasks it is supposed to perform.
Vision
A robot that assists visually-impaired humans

The robot uses infrared signals to stay a few steps ahead of its user. It uses a rotating ultrasonic sensor to continuously map the surrounding distances and alert the user of any nearby obstacle. This way, the user doesn't have to physically carry and waive a stick all the time; the robot walks ahead and literally acts as a guide.
Wall Proximity Color Changer
Made using Arduino® + EVShield
While experimenting with EVShield (to potentially use it for RoboCup), I got a crazy idea — to make a device whose color can be changed by placing it closer to or farther from the wall. I brand it as the most frustrating way to change a light's color. Although it was a fun idea, it could not have been implemented without mathematics and logic. I was working with an RGB device, but I could not think of a proper distance to RGB scale. On researching about how different color modes, such as RGB, HSL, and CMYK, handle the mixing of colors numerically, I found HSL to be the most appropriate one for creating my desired scale. I made an algorithm to convert distance to an HSL value, and then another to convert the HSL value to RGB, so that the information becomes compatible with the RGB lights of my device.
Films
Psycho Social
When my friends and I learned that the “Blue Whale Game” had reached India, we were deeply saddened by this social-media “challenge” that requires teenagers to complete various tasks, the last of which is to commit suicide. We decided to raise awareness and combat this phenomenon by making a film.
Using symbolic effects, the film shows the events that lead-up to a student accepting the challenge, the kind of tasks given to him, and his emotions as the story proceeds.
The film has been awarded at two festivals:
- National Science Film Festival 2018
- Bronze Beaver Award
- Special Award for Technical Excellence: Sound Recording and Design
- International Young Film Maker's Festival 2017
- Meritorious Award
Are We All Animated?
The animated short film was made on the theme: "Explore exciting new ways to express human movement" for A20Z India Schools Video Competition 2015. Through the film, we (team of 2) discussed the abstract concept of simulated reality in a fun way that was consistent with the latest trends among young adults of late 2015.
The film was awarded 2nd prize by a jury from Cambridge English.